Overall Architecture
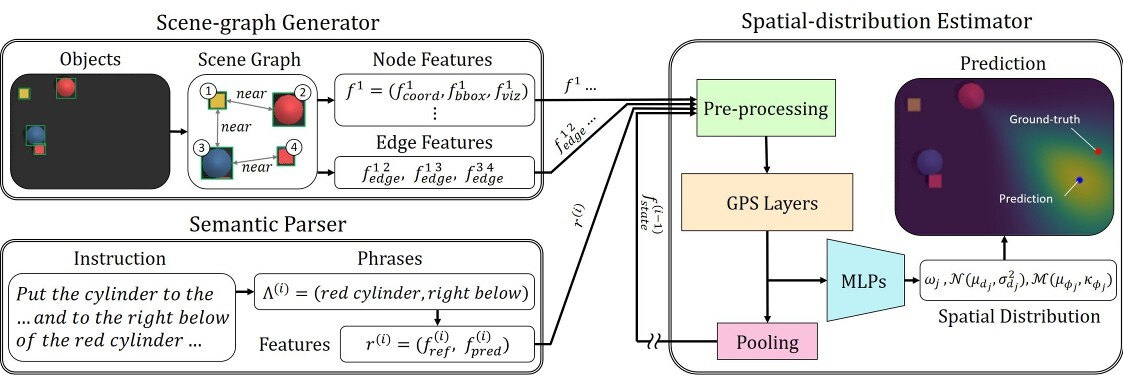
The overall architecture of LINGO-Space on a tabletop manipulation task. Given a composite instruction, a graph generator provides a scene graph. A semantic parser decomposes the instruction into a structured form of relation-embedding tuples $r^{(i)}$ where $i\in\{1..M\}$. Finally, a spatial-distribution estimator incrementally updates a probabilistic distribution of locations satisfying spatial constraints encoded in the embedding tuples.